Current Focus
Mapping Behavioral Consensus & the Empirical Pareto Frontier
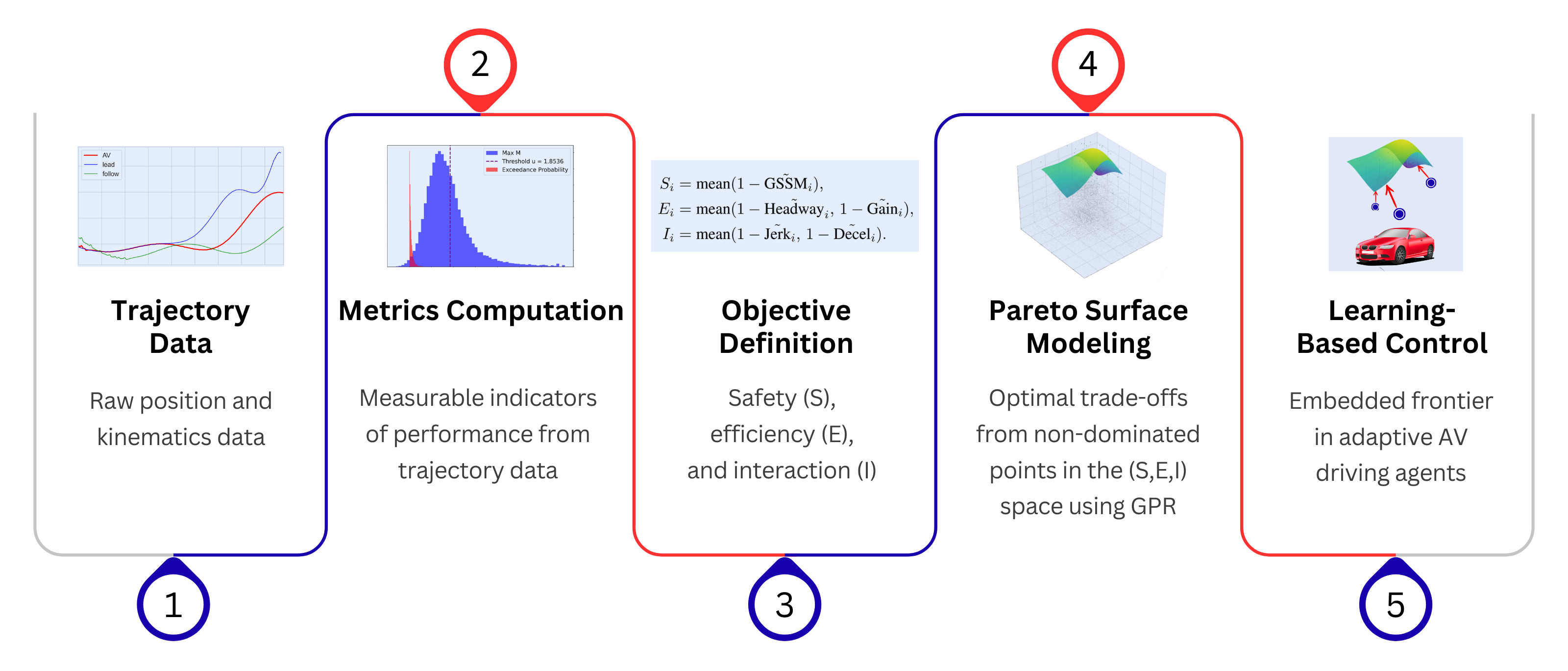
Our current research bridges the gap between empirical traffic behavior and autonomous vehicle (AV) policy. By analyzing thousands of high-resolution trajectories, we are developing a framework to quantify behavioral consensus and serve as the foundation for training autonomous agents to navigate the trade-offs in the multi-objective space.
A Modular, Minimally Invasive Learning Framework
Building on the consensus baseline, we synthesized a framework that executes trade-off derivation on a timestep basis. By utilizing only current and previous states with no access to future data, the model is simulation-ready and avoids the look-ahead bias of passive datasets. This minimally invasive approach generalizes across trajectory sets to guide adaptive control policies.
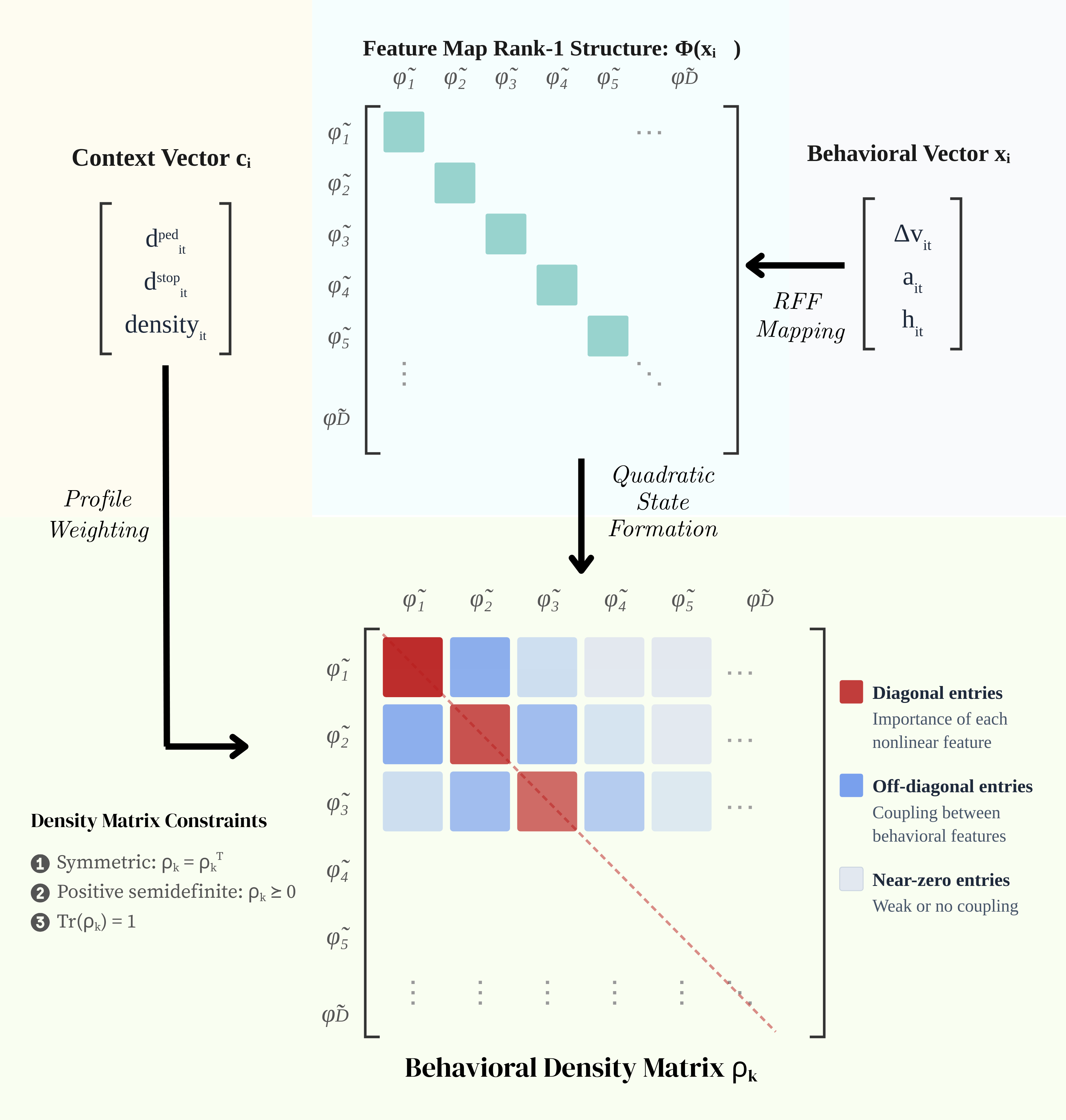
Behavioral Heterogeneity as a Quantum-Inspired Density Metrices
Rather than reducing driver heterogeneity to discrete labels (e.g., aggressive vs. cautious), we introduce a state-based representation in which each driver is modeled as an evolving latent structure. Using a quantum-inspired density matrix formulation combined with nonlinear Random Fourier Feature embeddings, the framework captures mixed and transitional behavioral patterns while preserving temporal continuity. Contextual activation allows behavioral regimes to adapt to surrounding traffic and infrastructure conditions, enabling a unified treatment of urban and freeway environments without manually defining behavior classes.